LRK
Erfahrenes Mitglied
Alles Klar, ich hab' nochmal von vorne angefangen und ein ganz neues Rig gemacht. Ich fasse mal kurz zusammen:
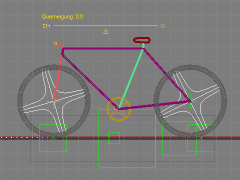
Wie zuvor sind zwei Helfer-Dummies auf dem Pfad welche durch die besagte Addition auf Abstand gehalten werden (Bezeichnung: Vorder- und Hintergleiter). Ein weiterer Dummy bekam die Anweisung, immer in der Mittelposition zwischen diesen beiden Dummies zu sein (Mittelgleiter). Nun kam noch ein Dummy hinzu, der dem Mitteldummy durch eine Federbeschränkung zu folgen versucht (Federgleiter). Dann kam ein Quaderobjekt dazu, welches seinen Drehpunkt im Mittelpunkt des Vordergleiters hat, diesem angehängt wurde und zudem die Anweisung bekam, auf den Federgleiter zu schauen (Ausrichtungsbox). Diesem Quader wurde ein weiterer Dummy angehängt, der über einen eingeblendeten Schieberegler nach links oder rechts geneigt wird. Daran hängt das eigentliche Fahrrad. Am Fahrrad hängt das Lenkerobjekt dran welches über die lokale Achsteuerung um seine nun querverlaufende Achse gedreht wird.
Sodele... Also Querneigung und Lenkerstellung werden jetzt manuell animiert. Der Computer könnte eh nicht erkennen, ob die Kurven schnell und stark geneigt oder langsam und wenig geneigt gefahren werden müssten. Außerdem wird der Pfadprozentwert des Hauptbahnobjektes (Hintergleiter) jetzt weich animiert, einfach indem er die Y-Position eines weiteren animierten Helferobjektes als Referenz nimmt. Die Räder drehen sich wie gehabt. Das Hinterrad zieht dabei auf einer engeren Bahn hinterher, wie in Echt. Hab' gerade noch ein Pedalrad hinzugefügt, was sich mit der halben Umdrehungsrate der Räder dreht. Diese Apparratur sollte jetzt erstmal komplex genug sein, um eine glaubhafte Fahrradszene zu ermöglichen. Wer will, lädt sich das Teil mal runter, gemacht wurde es in Max 2008. Bitte meinen Beitrag positiv Bewerten. Guten Tag.")
Wie zuvor sind zwei Helfer-Dummies auf dem Pfad welche durch die besagte Addition auf Abstand gehalten werden (Bezeichnung: Vorder- und Hintergleiter). Ein weiterer Dummy bekam die Anweisung, immer in der Mittelposition zwischen diesen beiden Dummies zu sein (Mittelgleiter). Nun kam noch ein Dummy hinzu, der dem Mitteldummy durch eine Federbeschränkung zu folgen versucht (Federgleiter). Dann kam ein Quaderobjekt dazu, welches seinen Drehpunkt im Mittelpunkt des Vordergleiters hat, diesem angehängt wurde und zudem die Anweisung bekam, auf den Federgleiter zu schauen (Ausrichtungsbox). Diesem Quader wurde ein weiterer Dummy angehängt, der über einen eingeblendeten Schieberegler nach links oder rechts geneigt wird. Daran hängt das eigentliche Fahrrad. Am Fahrrad hängt das Lenkerobjekt dran welches über die lokale Achsteuerung um seine nun querverlaufende Achse gedreht wird.
Sodele... Also Querneigung und Lenkerstellung werden jetzt manuell animiert. Der Computer könnte eh nicht erkennen, ob die Kurven schnell und stark geneigt oder langsam und wenig geneigt gefahren werden müssten. Außerdem wird der Pfadprozentwert des Hauptbahnobjektes (Hintergleiter) jetzt weich animiert, einfach indem er die Y-Position eines weiteren animierten Helferobjektes als Referenz nimmt. Die Räder drehen sich wie gehabt. Das Hinterrad zieht dabei auf einer engeren Bahn hinterher, wie in Echt. Hab' gerade noch ein Pedalrad hinzugefügt, was sich mit der halben Umdrehungsrate der Räder dreht. Diese Apparratur sollte jetzt erstmal komplex genug sein, um eine glaubhafte Fahrradszene zu ermöglichen. Wer will, lädt sich das Teil mal runter, gemacht wurde es in Max 2008. Bitte meinen Beitrag positiv Bewerten. Guten Tag.
Anhänge
Zuletzt bearbeitet:
