Hallo alle zusammen,
ich sitze heute schon den ganzen Tag an einem Problem, was ich eigentlich nicht haben sollte :
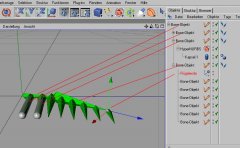
Ich habe einen Vogelflügel mit Bones gebastelt, erstelle (m)ein Nullobjekt am Ende des Flügels um diesen per IK anzuheben, und das einzige was sich hebt ist das Nullobjekt
Wenn ich es nicht schon X-mal gemacht hätte ... Aber ich befürchte, das ich gerade den Wald vor lauter Bäumen gerade nicht sehe.
Arbeitsschritte (Release 8,5):
Bones erzeugen - fixieren - Kinematik Tags hinzu - Nullobjekt unterordnen -> Dilemma.
Kann mir bitte einer von euch "den Kopf richten" ?
Grüße,
Marco
ich sitze heute schon den ganzen Tag an einem Problem, was ich eigentlich nicht haben sollte :
Ich habe einen Vogelflügel mit Bones gebastelt, erstelle (m)ein Nullobjekt am Ende des Flügels um diesen per IK anzuheben, und das einzige was sich hebt ist das Nullobjekt
Wenn ich es nicht schon X-mal gemacht hätte ... Aber ich befürchte, das ich gerade den Wald vor lauter Bäumen gerade nicht sehe.
Arbeitsschritte (Release 8,5):
Bones erzeugen - fixieren - Kinematik Tags hinzu - Nullobjekt unterordnen -> Dilemma.
Kann mir bitte einer von euch "den Kopf richten" ?
Grüße,
Marco