Hi!
Nochmal: bitte achte bzgl. Deiner durchgehenden Kleinschreibung auf die Netiquette.
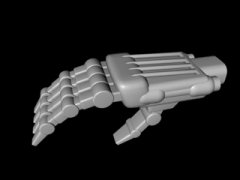
Schritt eins: grundsätzlich sind "Gelenke" nichts anderes als Hierarchien, was wiederum mit dem verschachteln von Objekten bzw. Null-Objekten zu tun hat:
Objekt "Hand" hat - hierarchisch - in sich "kleiner Finger", "Ringfinger", "Mittelfinger" usw.
Diese Null-Objekte liegen dort, worum sich der jeweilige Finger "drehen" soll. In z.B. "Zeigefinger" sitzt z.B. "Zeigefinger.2", dort, worum sich das zweite Gelenk drehen soll ... usw.
Resultat ist: drehst Du die Hand, folgen alle Finger und deren Glieder. Drehst Du "Zeigefinger", folgen nur die Glieder von "Zeigefinger", drehst Du "Zeigefinger.2" drehen sich nur die zwei letzten Glieder usw.
siehe evtl. auch unter
[C4D] RoboArm Part IV - Setup Inverse Kinematic wobei es dort um eine IK geht.
Schritt zwei: Du kannst nun diese einzelnen Winkel keyen und die Hand bewegt sich. Der Aufwand ist allerdings entsprechend groß: ca 15 Winkel pro Hand wollen animiert werden. Und da gibt es die Möglichkeit über Xpresso die Arbeit zu vereinfachen...
@Tutorials: ...hast Du schon mal in die C4D-Linkliste geschaut, vielleicht läßt sich da was feines entdecken
")
Liebe Grüße,
Mark.
")