Hallo Zusammen
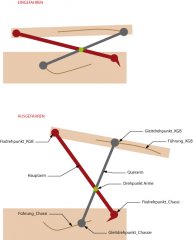
Ich habe ein grösseres Problem… ich will für eine Animation eine für mich etwas komplexere Mechanik erstellen! Mittlerweile habe ich die Inverse Kinematik für einfache Mechaniken verstanden (Roboterarm-Tutorial). Bei meiner Mechanik habe ich jedoch nicht wirklich eine Ahnung, wie ich das anpacken soll… ICH BRAUCHE EURE HILFE!
Ich bin für alle Arten von Ratschläge dankbar… bitte helft mir einfach
Ich habe ein grösseres Problem… ich will für eine Animation eine für mich etwas komplexere Mechanik erstellen! Mittlerweile habe ich die Inverse Kinematik für einfache Mechaniken verstanden (Roboterarm-Tutorial). Bei meiner Mechanik habe ich jedoch nicht wirklich eine Ahnung, wie ich das anpacken soll… ICH BRAUCHE EURE HILFE!
Ich bin für alle Arten von Ratschläge dankbar… bitte helft mir einfach