Blue_Mosquito
Grünschnabel
Hi Leutz,
hab folgendes Prob ich will das unten gezeigt Mechbein und dann den rest Animieren (Laufbewegung).
Nun hab ich aber das Prob das ich ich nich so richtig weiß was ich nun einsetze, also ob IK, Kinematik oder Bones ?
Den Mech hab ich schon so einigermaßen in eine Hierarchie unterteilt, da es kein NURB o.ä. ist sondern aus vielen kleinen bzw. großen Teilen (Objekten) besteht.
Nun denke ich das ich eher keine Bones nehme da das ja Deformer sind und ich ja kein zusammenhängenden Mesh habe.
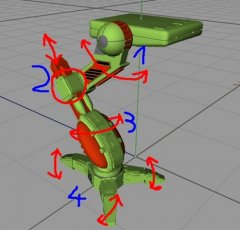
Wie kann ich nun das realisieren das sich 1, 3 & 4 nur um eine Achse drehen ?
Bei 2 soll sich das eingekreiste Objekt um die selbe Achse wie 3 drehen aber noch zusätzlich "Hoch und Runter" bewegen können.
Oder nützt mir MTK (Multi Target Kinematik) etwas ?
Könnt Ihr mir bitte helfen oder Tipps geben
hab folgendes Prob ich will das unten gezeigt Mechbein und dann den rest Animieren (Laufbewegung).
Nun hab ich aber das Prob das ich ich nich so richtig weiß was ich nun einsetze, also ob IK, Kinematik oder Bones ?
Den Mech hab ich schon so einigermaßen in eine Hierarchie unterteilt, da es kein NURB o.ä. ist sondern aus vielen kleinen bzw. großen Teilen (Objekten) besteht.
Nun denke ich das ich eher keine Bones nehme da das ja Deformer sind und ich ja kein zusammenhängenden Mesh habe.
Wie kann ich nun das realisieren das sich 1, 3 & 4 nur um eine Achse drehen ?
Bei 2 soll sich das eingekreiste Objekt um die selbe Achse wie 3 drehen aber noch zusätzlich "Hoch und Runter" bewegen können.
Oder nützt mir MTK (Multi Target Kinematik) etwas ?
Könnt Ihr mir bitte helfen oder Tipps geben


")