Hi,
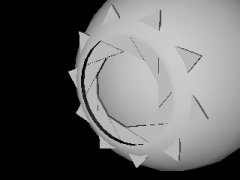
Ich hab mir gestern Abend I, Robot angesehen und konnte es mir nciht verkneifen jetzt meinen einnngenen Roboter zu versuchen. Ich bin gerade dabei meine Vision der Augen zu verwirklichen. Die Iris die sich beim Menschen ja durch kleine Muskeln verengt soll bei dem Bot dann so ähnlich wie diese Luftschleusen aus Stardreck funktionieren. Man hat also (so stelle ich mit das vor) 8-9 Dreiecke in einem Array die zusammen eine geschlossene Fläche ergeben. Wenn ich die Dreiecke nun drehe ergibt sich in der Mitte eine Öffnung. Mein Pröblem ist nun allerdings, dass die Dreiecke mit einander kollidieren, ganz egal wie ich sie drehe.
Gibt es da vllt ne schlauere Möglichkeit so etwas zu machen?
Wenn jemand meins versucht nachzumachen sei dazu gesagt, dass das Drehen des Dreiecks an sich nix bringt. Man muss die Achse des Selben drehen, da die Dreiecke tangential an der achse in Array geschoben werden.
Danke, Alex
edit: ausserdem sieht man ja den "Fehler", dass die Dreicke aus dem Auge herausragen. Was sie ja net sollen.
Ich hab mir gestern Abend I, Robot angesehen und konnte es mir nciht verkneifen jetzt meinen einnngenen Roboter zu versuchen. Ich bin gerade dabei meine Vision der Augen zu verwirklichen. Die Iris die sich beim Menschen ja durch kleine Muskeln verengt soll bei dem Bot dann so ähnlich wie diese Luftschleusen aus Stardreck funktionieren. Man hat also (so stelle ich mit das vor) 8-9 Dreiecke in einem Array die zusammen eine geschlossene Fläche ergeben. Wenn ich die Dreiecke nun drehe ergibt sich in der Mitte eine Öffnung. Mein Pröblem ist nun allerdings, dass die Dreiecke mit einander kollidieren, ganz egal wie ich sie drehe.
Gibt es da vllt ne schlauere Möglichkeit so etwas zu machen?
Wenn jemand meins versucht nachzumachen sei dazu gesagt, dass das Drehen des Dreiecks an sich nix bringt. Man muss die Achse des Selben drehen, da die Dreiecke tangential an der achse in Array geschoben werden.
Danke, Alex
edit: ausserdem sieht man ja den "Fehler", dass die Dreicke aus dem Auge herausragen. Was sie ja net sollen.
")
 Aber man kann bei Solchen Filmen ja nicht immer unbedingt von logischen Vorgängen ausgehen.
Aber man kann bei Solchen Filmen ja nicht immer unbedingt von logischen Vorgängen ausgehen.