Hallo liebe Tutorialisten und Tutorialistinnen!
Ich versuche gerade eine Konstruktion, ähnlich den bekannten Roboterarmen,
in Cinema 4D umzusetzen. Bis jetzt ist es auch kein Problem gewesen.
Ich verwende dazu die Inverse Kinematik.
Doch nun kommt ein dritter Drehpunkt hinzu und der macht es mir schwer weiter
zu kommen.
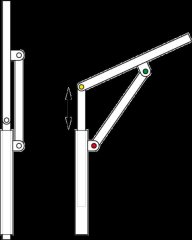
Auf dem Bild seht ihr was ich haben will und wie die Bewegung verläuft.
Und ihr seht, rot markiert, was ich mit der IK schon erreichen konnte.
Wie bringe ich jetzt aber die IK dazu den Stab der im Rohr steckt (links unten),
das er bei Bewegung des Endes (rechts oben, rechte Abb.) bei der Bewebung
mitzugehen
Ich würde mich sehr über einen Rat oder eine Idee freuen.
Danke schonmal!
Tachikoma
Ich versuche gerade eine Konstruktion, ähnlich den bekannten Roboterarmen,
in Cinema 4D umzusetzen. Bis jetzt ist es auch kein Problem gewesen.
Ich verwende dazu die Inverse Kinematik.
Doch nun kommt ein dritter Drehpunkt hinzu und der macht es mir schwer weiter
zu kommen.
Auf dem Bild seht ihr was ich haben will und wie die Bewegung verläuft.
Und ihr seht, rot markiert, was ich mit der IK schon erreichen konnte.
Wie bringe ich jetzt aber die IK dazu den Stab der im Rohr steckt (links unten),
das er bei Bewegung des Endes (rechts oben, rechte Abb.) bei der Bewebung
mitzugehen
Ich würde mich sehr über einen Rat oder eine Idee freuen.
Danke schonmal!
Tachikoma