Hallo Freunde!
Ich arbeite gerade an einem Robotermodell. Das ist bereits fertig gestellt. Jetzt gehts ans "animierbar-machen".
Ich hab viele Gelenke per Espresso bereits mit Slider verknüpft und das klappt alles Prima, aber um es noch einfacher (und vor allem fürs "Gehen" machbar) machen, schaue ich mich nach einer Lösung um.
Der Roboter hat viele "Hydraulikpumpen" die sich beispielsweise beim Beugen des Arms mitbewegen sollen. Mit der bisherigen Espresso-Lösung klappt das natürlich, jedoch hätte ich gerne nur einen Punkt um den Arm zu seinem Bestimmungsort zu bewegen, um dabei allerlei Gelenke und Hydraulikschnickschnack in ihren eigenen Achsenmöglichkeiten mitzubewegen.
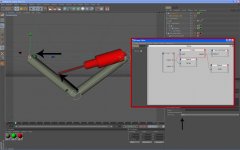
Habe das jetzt mit "Joints-Setzen" versucht. Habe hier mal zwei Bilder eines Tests den ich gemacht hab. Vielleicht blickt ja schon einer durch und kann mir helfen. Habs auch mit Bereichswandlern zwischen Joint.Ziel und dem zu bewegenden Objekt versucht, aber ich kriege es niemals genau hin...
Siehe Anhang.
Ich arbeite gerade an einem Robotermodell. Das ist bereits fertig gestellt. Jetzt gehts ans "animierbar-machen".
Ich hab viele Gelenke per Espresso bereits mit Slider verknüpft und das klappt alles Prima, aber um es noch einfacher (und vor allem fürs "Gehen" machbar) machen, schaue ich mich nach einer Lösung um.
Der Roboter hat viele "Hydraulikpumpen" die sich beispielsweise beim Beugen des Arms mitbewegen sollen. Mit der bisherigen Espresso-Lösung klappt das natürlich, jedoch hätte ich gerne nur einen Punkt um den Arm zu seinem Bestimmungsort zu bewegen, um dabei allerlei Gelenke und Hydraulikschnickschnack in ihren eigenen Achsenmöglichkeiten mitzubewegen.
Habe das jetzt mit "Joints-Setzen" versucht. Habe hier mal zwei Bilder eines Tests den ich gemacht hab. Vielleicht blickt ja schon einer durch und kann mir helfen. Habs auch mit Bereichswandlern zwischen Joint.Ziel und dem zu bewegenden Objekt versucht, aber ich kriege es niemals genau hin...
Siehe Anhang.

")
")